Sprache

Mit flexibler Fertigung als Kern unterstützt Fabriken auf der ganzen Welt bei der Realisierung von Industrie 4.0
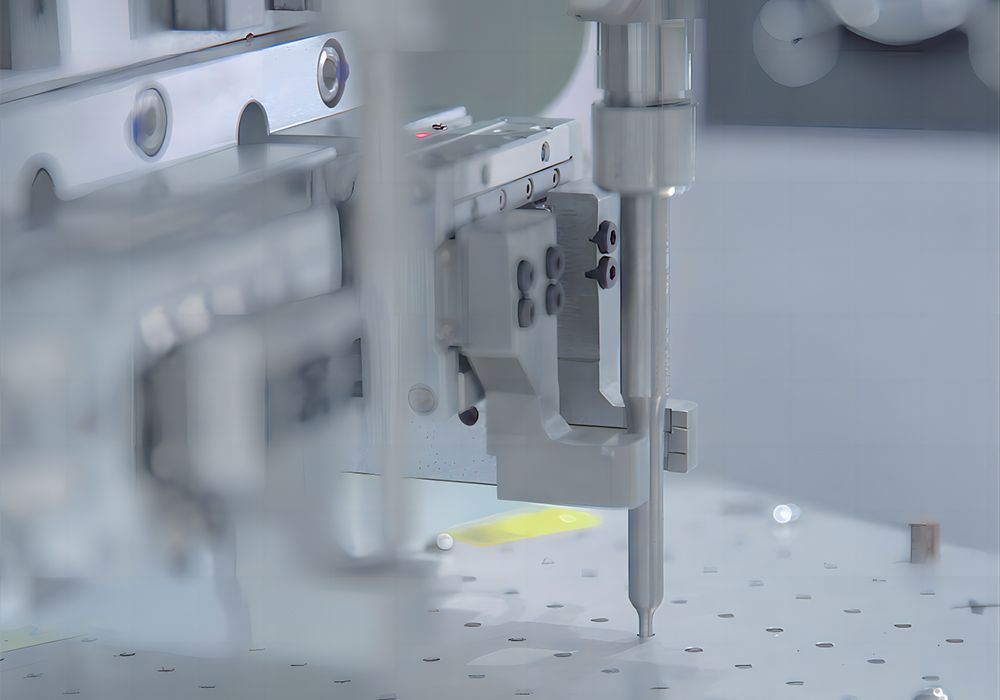
Schraubverschluss-Maschine

Schraubverschluss-Maschine




| Grundparameter | |
| Schraubenspezifikation | M0.6~M8 |
| Leistung | 900 W |
| Stromversorgung | AC 220V |
| Wiederholgenauigkeit | ±0.02mm |
| Armlänge |
X-Achse 100~700mm
Y-Achse 100~300mm Z-Achse 100mm |
|
Bewegungsgeschwindigkeit |
X/Y-Achse 1000 mm/s
Z-Achse 500 mm/s |
| Optional | |
| Sekundäre Lokalisationsvision | 00 Nein / 01 Ja |
| Bewegungsvision | 00 Nein/01 Ja |
| Schwimmende Höhenerkennung | 00 Nein/01 Ja |
| Automatische Drehmomentkalibrierung | 00 Nein / 01 Ja |
| Grundparameter | |
| Schraubenspezifikation | M0.6~M6 |
| Leistung | 1500 W |
| Stromversorgung | AV220/10A |
| Armlänge |
1 Wellenarm 325mm
2 Wellenarm 265mm |
|
Wiederholgenauigkeit |
1~2 Gelenke: ±0.02mm
3 Gelenke: ±0.03mm |
| Optional | |
| Sekundäre Lokalisierungsvision | 00 Nein /01 Ja |
| Bewegungsvision | 00 Nein /01 Ja |
| Schwimmende Höhenerkennung | 00 Nein /01 Ja |
| Automatische Drehmomentkalibrierung | 00 Nein /01 Ja |


| 1.5~3s/Stk | EFFIZIENZ | 5s/Stk | |||
| 0~1/Person | ARBEITSKRAFT | 2~3/Personen | |||
| Bis zu 99,95% | AUSBEUTE | Es variiert von Person zu Person | |||
|
Echtzeitüberwachung des gesamten Prozesses der engen Zahlung und rechtzeitige
Alarm bei Abweichung |
AUSNAHME
BEHANDLUNG |
Manuelle Erkennung ist unkontrollierbar | |||
|
Hochpräzise
Drehmomentsteuerung, Echtzeitdatenüberwachung und -anpassung |
DREHMOMENT
STEUERUNG |
Verlassen Sie sich auf die Erfahrung der Mitarbeiter | |||
| Stabile Betrieb und fast keine Managementkosten | MANAGEMENTKOSTEN |
Hohe Fluktuation
Rate, ungleichmäßige Qualität des Personals und hohe Managementkosten |
|||
|
Einmalige Investition ohne
kontinuierliche Investition |
EINGABEKOSTEN |
Kontinuierliche Investition
|
Anwendungsindustrie
-
3C Elektronik Für Mobiltelefone, Tablets, Computer und andere Verbraucherelektronikprodukte bieten wir automatische Anziehungs- und Montagelösungen.

-
Energiespeicherung Bieten Sie eine automatische Lösung für tiefes Anziehen von kleinen Energiespeichergeräten.

-
Elektrowerkzeug Bereitstellen automatische intelligente Schraubanziehlösung für Elektrowerkzeuge.

-
Automobil Bieten Sie intelligente Schraubanziehlösungen für Automobilteile, Innenteile, Automobil-Elektronik usw.






WISSEN SIE
WARUM UNS WÄHLEN
WAS IST DER UNTERSCHIED ZWISCHEN INTELLIGENTEM ANZIEHEN UND ZAHLUNGSROBOTER?
-
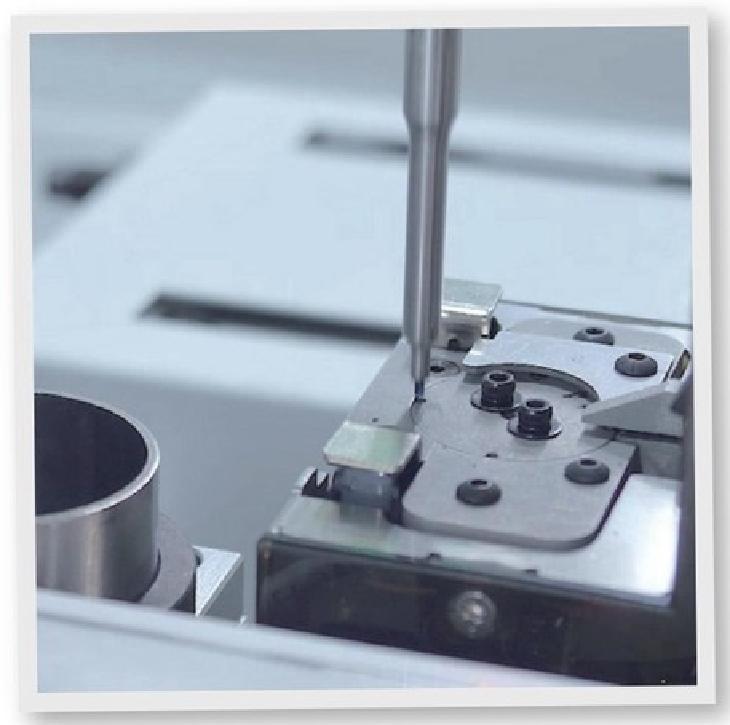
Exklusiv für Mikroschrauben Speziell für die Forschung und Entwicklung von Mikroschrauben konzipiert, kann der kleinste M0.6-Schrauben fest unterstützen, um genauer zu sein;
-
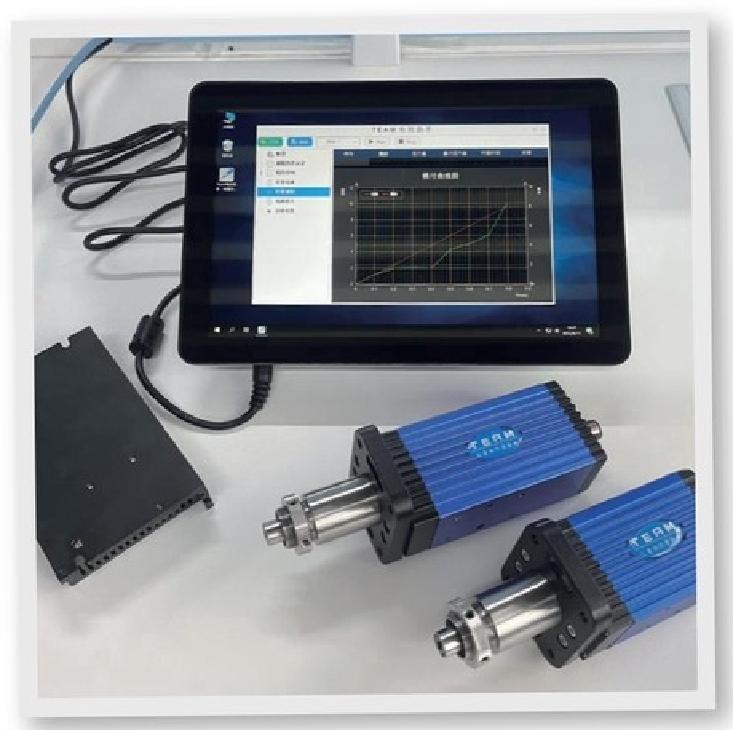
Steuerbarer Kernprozess Unabhängige Forschung und Entwicklung von Kernkomponenten und Steuerungsalgorithmen, Drehmomentgenauigkeit bis zu 3%, um professioneller zu werden;
-
Die Ausbeute an festen Zahlungen ist höher Eigenes Festzahlungssoftware, Echtzeitüberwachung des Festzahlungsprozesses, mehr Taktikrutschzahn, Schwimmhöhenmessung, Ausbeute bis zu 99,95%, um stabiler zu werden;
-
Komplexe Szenarien anwenden Erkunden Sie das tatsächliche Anziehszenario und entwickeln Sie geeignete Produkte für spezielle Szenarien wie Interferenzen, Senkungen, Seiten usw.,

die für komplexere Szenarien geeignet sind;


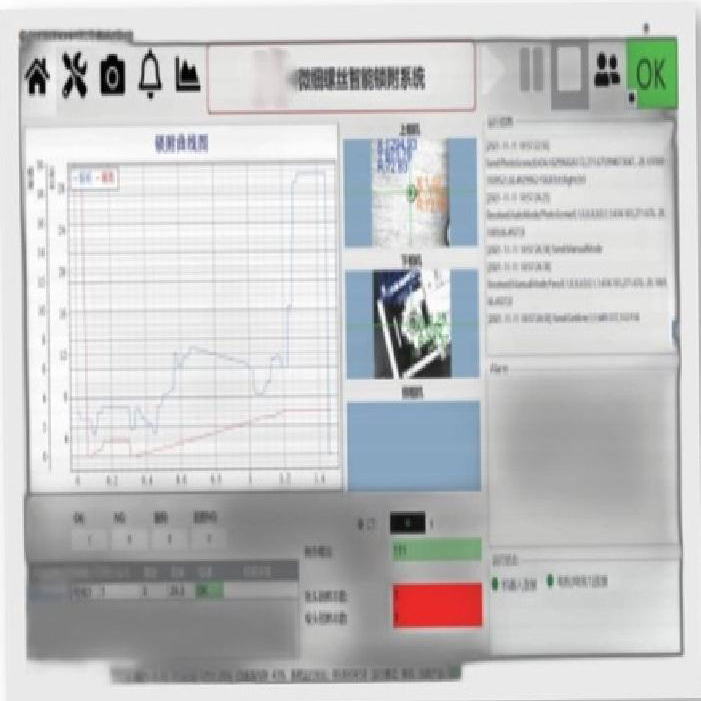
| DETEKTION VON DREHMOMENT, ANZAHL DER UMDREHUNGEN, | ||
| SCHWIMMHÖHE, NEIGUNG UND RUTSCHEN | ||
|
Ergebnisurteil OK | |
|
Setzen Sie Drehmoment:√
Anzahl der Umdrehungen einstellen:√ |
Beispiel: Setzen Sie den Drehmomentwert auf 1 Nm und ziehen Sie die Anzahl der Umdrehungen auf 10 fest.
Nach Ausführung des Anziehvorgangs werden die Echtzeitüberwachungsdaten zurückgemeldet. Wenn der Drehmomentwert 1 Nm erreicht und die Anzahl der Umdrehungen 10 Umdrehungen erreicht, bewertet die Software dass das Anziehergebnis OK ist und gibt ein OK-Signal aus. |
|

|
Ergebnisurteil NG | |
| 1. Schwimmhöhenmessung | ||
|
Beispiel: Setzen Sie den Drehmomentwert auf 1 Nm und ziehen Sie fest
die Anzahl der Umdrehungen auf 10. Nach Ausführung des Anziehvorgangs wird die Echtzeitüberwachungsdaten zeigen, dass der Drehmomentwert 1Nm erreicht und die Anzahl der Umdrehungen nur 5 beträgt. Zu diesem Zeitpunkt wird von der Software festgestellt, dass das Anziehergebnis NG ist und die NG-Kategorie hoch schwebt, und gibt ein NG-Signal aus. Setzen Sie die Anzahl der Umdrehungen: × |
||
|
Setzen Sie Drehmoment:√
Urteilsergebnis: Schwebende Höhe 2. Erkennung des Gleitverzahns |
||
|
Nach Ausführung des Anziehvorgangs zeigen die Echtzeitüberwachungsdaten | |
| Beispiel: Setzen Sie den Drehmomentwert auf 1 Nm und ziehen Sie die Anzahl der Umdrehungen auf 10 fest. | ||
|
Feedback zeigt, dass die Anzahl der Umdrehungen 10 erreicht hat,
und der Drehmomentwert weniger als 1Nm beträgt. Zu diesem Zeitpunkt stellt die Software fest, dass das Anziehergebnis NG ist und die NG-Kategorie ist Leerlauf (Gleitgewinde) und gibt ein NG-Signal aus. Setzen Sie das Drehmoment: × |
||
|
Setzen Sie die Anzahl der Umdrehungen: √
Urteilsergebnis: Leerlauf (Rutschen) Judgment result: Idling (slippage) |
||






KONTAKTIEREN SIE UNS
Kontaktiere uns
Produktinformationen
Menge
Einheit
Stück
Unterstützung bei der Bestellung von Proben, Anpassung, Großhandel direkt und vollständiger Zahlung. Wenn das Produkt, nach dem Sie suchen, keine entsprechenden benutzerdefinierten Inhalte hat, füllen Sie bitte das untenstehende Formular aus, um uns zu kontaktieren, und wir werden so schnell wie möglich antworten.